工作台
工作台是LeanRunner控制器管理任务执行的主要功能区。包括如下:
- 流程库管理
- 任务模板管理
- 任务管理
- 执行管理
- 机器人管理
流程库管理
流程库管理的是任务执行的时候需要的流程包文件(下面简称包文件),它可以是:
- zip格式文件,包含RPA脚本
- 一个*.js后缀的单独的RPA Javascript文件。
- RPA自动化脚本所依赖的库
- zip文件包含的其它任何数据文件
RPA 代码文件主要通过包管理平台进行维护。可以通过该界面上传新包,更新已有的包,配置包的名称,描述等信息或删除包。
下面是流程库的管理界面:

- 新建流程: 当编写了RPA脚本,可以上传到控制器进行管理。
- 配置: 当RPA代码有更改可以在配置选项中进行更新。
- 删除: 删除当前RPA文件。
包文件在执行时会下发到机器人,格式为ZIP的包文件会解压到执行目录,然后执行自动化操作。
流程包的编辑
点击“新建流程”,或是在一个已有的流程上点击配置,可以打开流程包文件的编辑界面,如下图:

- 上传包文件会替换旧的包文件。
- 名称: 为这个包的命名,可以是任何便于记忆的名称。
- 描述: 包的功能描述信息。 注意:任务可以使用一个或多个包,修改一个包的名称不影响现有任务对这个包的引用。
任务模板管理
任务模板可以用来快速创建一个新的任务。用户可创建常用任务模板,用来快速创建新的任务。下面是任务模板的管理界面:
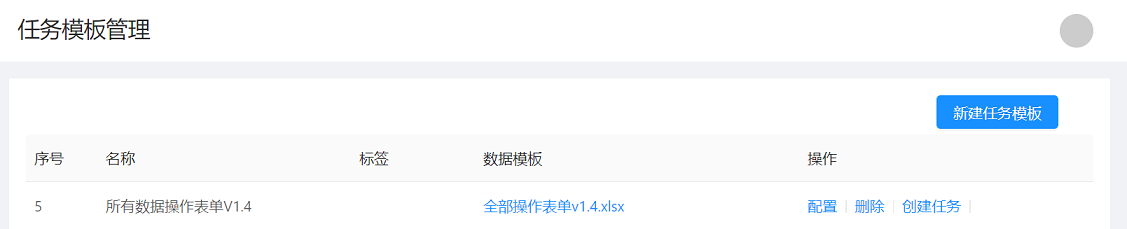
任务模板主要功能:
- 新建任务模板: 创建新的任务模板。
- 配置: 对任务模板进行配置。
- 删除: 删除此任务模板。
- 创建任务: 根据此模板创建任务管理。
新建/编辑任务模板

任务标签页:
- 名称: 任务模板名称。
- 标签: 为不同的任务模板添加不同的标签。
- 流程包: 所使用的RPA流程包。
- 描述: 模板的描述信息。
- 运行命令: 设置RPA 执行命令。
数据标签页
- 数据模板: RPA运行的数据模板文件。
任务管理
任务管理界面用来在创建和管理RPA的任务。管理员权限的用户在这里可以查看所有的任务,普通用户权限可以查看并编辑自己创建的任务。
下面是任务管理界面:

- 新建任务: 创建新的任务。
- 删除: 删除此此任务。
- 执行: 分为立即执行与执行历史; 立即执行则马上执行此任务,执行历史则是展示此任务执行的历史情况。
新建任务
新建任务功能与新建任务模板功能类似。可以参考新建任务模板相关界面说明。

任务标签页:
- 名称: 任务名称。
- 优先级: 对此任务设置优先级。数字越小表明优先级越高。
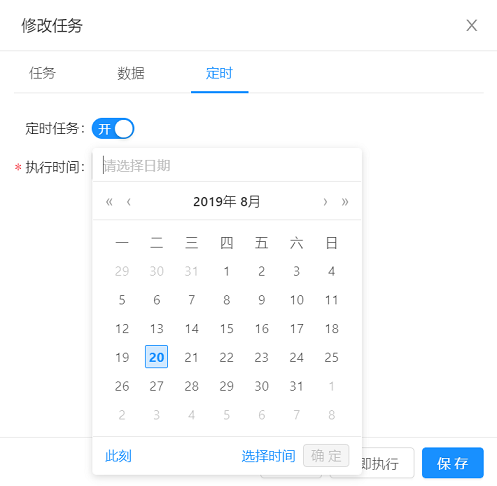
数据页:
- 数据: 此任务对应的数据文件。
- 定时: 是否是定时任务,如果是定时任务,则在此处显示定时信息。
执行历史
选择一个任务的执行历史,可以查看这个任务相关的所有相关的执行历史信息:
- 选择左侧的执行时间,详细页面中可显示执行的详细内容。
- 立即执行: 执行当前任务。
在某个任务的下拉菜单中选择“立即执行”:

会计划一个任务的执行,同时会转到任务执行详情页面。如果有空闲的机器人,会立即启动执行任务。
执行管理
所有任务的执行管理可以在“执行”界面中管理。 任务执行历史。点击详情-可以看到任务执行情况
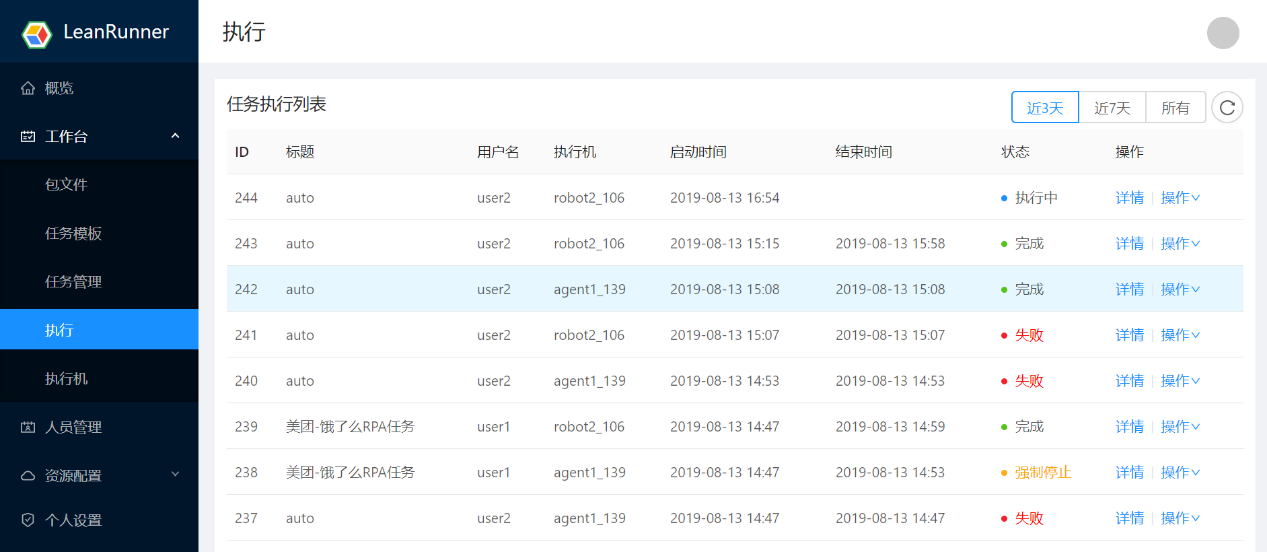
- 近3天/近7天/所有: 选择浏览部分结果
- ID: 任务执行ID
- 标题: 执行任务的标题
- 用户名: 执行此任务的用户信息
- 机器人: 执行任务的机器
- 启动时间: 任务启动的时间
- 结束时间: 任务结束的时间
- 状态: 当前任务执行状态,分为完成,失败,未启动,强制停止
- 详情: 任务执行的详细信息
- 操作: 对当前任务根据状态有相应的可执行操作,如冻结、强制停止和删除:
- 冻结:任务计划执行,但尚未启动,可以选择冻结这个执行。有时候,可以通过冻结其它待执行任务,让某个任务优先执行
- 恢复:恢复一个已经冻结的任务到正常状态,将由可用的机器人执行
- 强制停止: 任务在执行过程中被强制停止
- 删除:删除此任务
执行报告
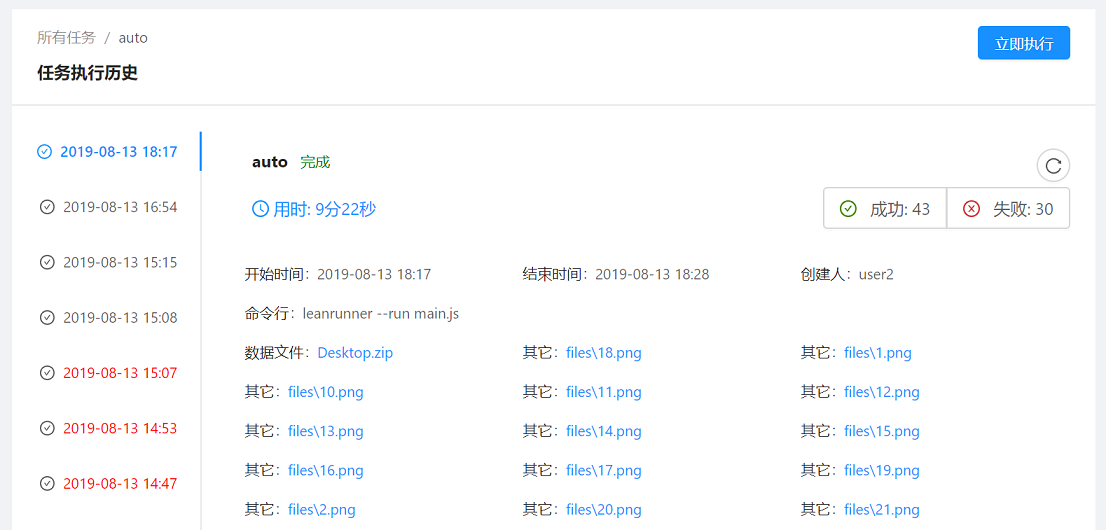
在上面的执行管理界面点击某一条执行记录,查看执行报告。执行报告分为两部分:汇总信息和执行详情。
汇总信息
汇总信息如下图:

它包含的字段内容:
- 用时: 执行此任务总耗时。
- 成功: 成功的步骤数量。
- 失败: 失败的步骤数量。
- 跳过: 跳过个数。
- 开始时间: 运行开始时间。
- 结束时间: 运行结束时间。
- 创建人: 创建此任务的用户。
- 命令行: 执行此任务的命令行脚本。
- 数据文件: 驱动此任务的数据文件。
其它: 执行过程中的错误截屏。
“成功”和“失败”按钮除了显示本次执行的成功、失败步骤数量以外,它们也是过滤器。点击后会过滤掉相应的步骤。例如在初始显示的时候,所有步骤都会显示,当点击“成功”后,成功按钮会隐藏,界面只会显示所有出错的步骤。
执行详情
在汇总信息的下面,会显示执行的场景和步骤信息,如下:

脚本中定义的场景和步骤会显示在执行监控。
执行状态分为以下几类:
- 未启动:刚创建的任务执行,还未分发给任何机器人执行
- 完成:执行结束
- 失败:执行过程中因为异常导致执行无法启动,例如机器人所在的执行机上没有安装某些依赖组件,或流程包文件在控制器上被不小心手动删除等。
- 执行中:执行正在进行,执行的步骤信息会实时发送到任务详情页面,显示当前的执行状态。
强制停止:执行中的任务,如果用户发现执行有异常,可以通过点击下图中的“立即停止”,选择手动停止任务的执行。
如果任务执行失败,需要重新执行,请打开关联的任务,点击“立即执行”。
机器人管理
管理控制器上连接的机器人:

它的界面上有如下的元素:
- ID: 数据库中的机器人ID。
- 标识名: 机器人别名。
- 机器名: 机器名称。
- IP地址: 机器人所在的执行机的IP。
- 平台: 机器人所在操作系统的平台,例如 win32或Linux。
- 版本: 机器人所在操作系统的版本号。
- 状态: 机器人的运行状态,例如离线、禁用、已连接等
- 配置: 机器人的配置信息。
- 详情: 机器人的运行日志。
- 删除: 删除此机器人。
在某一机器人上点击“配置”,可以打开机器人配置界面,查看更多详情。例如,可以禁用某机器人。
当某个新的机器人连接到控制器时,这个机器人是被禁用的,即不会被分配执行任务。只有在此界面中启用机器人,它才能获取任务并执行。
机器人配置

- 状态: 当前机器人的状态。
- 禁用选项:用于禁用机器人的复选框。设置某机器人禁用后,它不会执行新的任务,但是在禁用前已经开始的任务将会继续在该机器人上执行直到完成。
- 删除: 删除此机器人。该功能通常是用来删除已经不使用的机器人。